 Оценка 336
[+1/-0]
Оценка 336
[+1/-0]

 Оценить
Оценить 






| Оценка 336
[+1/-0]
Оценить
|
| Введение Рассуждение Реализация Использование Области применения мультиметодов |  |
Демонстрационный проект MMDemo
Создатель С++ Бьерн Страуструп в своей книге «Дизайн и эволюция С++» упоминал мультиметоды как одно из перспективных направлений в развитии языка. Однако в настоящее время мультиметоды в С++ не реализованы. В этой статье будет сделана попытка пролить свет на суть мультиметодов, особенности их использования в С++ и возможную реализацию.
Мультиметодами называют виртуальные функции, которые принадлежат сразу нескольким классам. Чтобы пояснить это, создадим простую иерархию классов геометрических объектов:
// базовый (абстрактный) класс геометрических объектов
struct GObject
{
virtualvoid draw(Graphics & gfx) = 0; // виртуальная функция отрисовки
};
// точкаstruct GPoint : GObject
{
virtualvoid draw(Graphics & gfx);
};
// отрезокstruct GFin : GObject
{
virtualvoid draw(Graphics & gfx);
};
extern GObject * p; // точка или отрезокvoid test(Graphics & gfx)
{
// вызывается GFin::draw или GPoint::draw
p->draw(gfx);
};
|
Классы GPoint и GFin в приведённом примере содержат виртуальный метод draw. Известно, что в каждый нестатический метод класса неявным образом передается указатель на обьект: this. Воспользуемся неким Си-подобным псевдокодом и запишем метод draw следующим образом, обозначив this явно:
struct GObject { };
struct GPoint : GObject { };
struct GFin : GObject { };
// виртуальные функции записанные псевдокодеvoid draw(virtual GObject * this, Graphics & gfx) = 0;
void draw(virtual GPoint * this, Graphics & gfx);
void draw(virtual GFin * this, Graphics & gfx);
extern GObject * p; // точка или отрезокvoid test()
{
// виртуальный вызов функции void draw(virtual GPoint * p) // или void draw(virtual GFin * p)
draw(p);
}
|
С помощью псевдокода мы фактически вынесли объявления методов за пределы класса, а ключевое слово virtual перед первым аргументом показывает, что эти функции виртуальные, а не перегруженные, и поиск функции выполняется во время выполнения по vtable первого аргумента this. Давайте так же немного изменим свою точку зрения и скажем, что draw – это глобальная функция с одним виртуальным аргументом. Назовем мультиметодом функцию, в которой несколько виртуальных аргументов. И введем для дальнейшего рассуждения мультиметод join, задачей которого является объединение двух геометрических объектов в фигуру:
struct Figure;
// мультиметоды для создания Фигуры из двух объектов// абстрактный мультиметод:
Figure * join(virtual GObject * a, virtual GObject * b) = 0;
// создает отрезок через две точки
Figure * join(virtual GPoint * a, virtual GPoint * b);
// объединяет точку и отрезок в треугольник
Figure * join(virtual GPoint * a, virtual GFin * b);
// соединяет линиями концы отрезков и создает четырехугольник
Figure * join(virtual GFin * a, virtual GFin * b);
extern GObject * a; // точка или отрезокextern GObject * b; // точка или отрезокvoid test() {
// вызывается один из трех мультиметодв
Figure * f = join(a, b);
}
|
В примере оба аргумента a и b имеют статический тип GObject, но во время выполнения под a и b могут скрываться объекты типов GFin и GPoint, и поиск нужной функции происходит по типам аргументов во время выполнения, т.к. мы обозначили эти аргументы как «виртуальные».
Используя псевдокод, можно также объявить мультиметод и другим способом:
struct GPoint
{
virtual Figure* join(virtual GFin *fin);
};
|
Такая форма записи как бы говорит нам: мультиметод принадлежит классу GPoint и имеет виртуальный аргумент GFin * fin. Но, чтобы не выделять какой-либо класс в качестве владельца мультиметода, будем всегда использовать первый вариант, в котором все классы равны:
Figure * join(virtual GPoint * a, virtual GFin * b); |
Еще раз взглянем на прототипы join, чтобы осознать первоначальное определение мультиметодов: виртуальные функции, принадлежащие сразу нескольким классам. Может возникнуть вопрос, почему выбрано именно это определение, а не уже озвученное: глобальные функции с несколькими виртуальными аргументами. Дело в том, что на уровне реализации должна существовать одна общая таблица мультиметодов (mvtable), разделяемая между несколькими классами (в данном случае GObject, GPoint и GFin). Синтаксически же мультиметоды проще объявлять как функции с виртуальными аргументами. Но давайте выберем определение, более близкое к реализации, нежели синтаксису.
Попробуем теперь найти ситуацию, в которой мультиметоды существенно облегчают жизнь программиста. Рассмотрим следующий сценарий (здесь и далее будет подразумеваться, что пользователь работает в некой графической среде): пользователь выделяет два объекта и выбирает операцию «соединить». Понятно, что применить обычную перегрузку мы не можем т.к. тип объектов, выбираемых пользователем, известен только во время выполнения. Зато мы можем воспользоваться мультиметодом join, который и вызовем в функции-обработчике:
// обработчик
void join_onClick(Selection * sel)
{
Figure * f = join(sel->item_get(0), sel->item_get(1));
}
|
Понятно, что такая техника работает только тогда, когда пользователь выделяет два объекта. Но это является всего лишь частным случаем. В реальной жизни может понадобиться создать фигуру соединением трех и более объектов. Например:
// создает треугольник из трех точек
Figure * join(virtual GPoint * a, virtual GPoint * b, virtual GPoint * c);
// четырехугольник из отрезка и двух точек
Figure * join(virtual GFin * a, virtual GPoint * b, virtual GPoint * c);
|
В этом случае программисту придется писать код, подобный приведённому ниже:
void join_onClick (Selection * sel)
{
Figure * f = NULL;
switch (sel->item_count())
{
case 2:
f = join(sel->item_get(0), sel->item_get(1));
break;
case 3:
f = join(sel->item_get(0), sel->item_get(1), sel->item_get(2));
break;
}
}
|
Что же мы видим? Удобства использования мультиметодов сведены на нет фиксированным списком аргументов. Т.е. для вызова мультиметода было бы удобно использовать прототип:
Figure * join(virtual GObject * argList[], size_t argc);
|
А для реализации мультиметодов удобны прототипы:
Figure * join(virtual GPoint * a, virtual GPoint * b, virtual GPoint * c); Figure * join(virtual GPoint * a, virtual GFin * b); |
Так как порядок следования аргументов, передаваемых через массив argList[], непредсказуем, будем считать, что и в объявлении мультиметода порядок следования аргументов значения не имеет. Т.е. следующие прототипы эквивалентны:
Figure * join(virtual GPoint * a, virtual GFin * b); Figure * join(virtual GFin * a, virtual GPoint * b); |
В этом случае устраняются все препятствия для использования мультиметодов:
void join_onClick (GObject * selection[], size_t n)
{
// чудесным образом вызывается join(GPoint *, GPoint *, GPoint *),// join(GPoint *, GFin *) или другой
Figure * f = join(selection, n);
}
|
Теперь задумаемся над еще одной проблемой из реальной жизни. Обратим внимание на мультиметод:
Figure * join(virtual GFin * a, virtual GFin * b); |
Он создает четырехугольник путем соединения концов двух отрезков. Рисунок показывает, что соединить концы можно двумя способами:
Т.е. под одним прототипом может скрываться сразу несколько функций. Попробуем написать две реализации для одного прототипа:
Figure * join(virtual GFin *, virtual GFin *) { // эта реализация создает обычный четырехугольник// ... } Figure * join(virtual GFin *, virtual GFin *) { // а эта – необычный// ... } |
Это выглядит абсурдно, и из-за неоднозначности такой мультиметод невозможно вызвать. Почему? Вспомним, что мы привыкли считать вызов виртуальной функции в С++ атомарной операцией (единой и неделимой), но по сути она состоит из двух частей: поиск по vtable и непосредственно вызов. В данном случае в результате поиска может быть найдено несколько функций, и однозначного вызова быть не может. Поскольку отказываться от удобств нет смысла, откажемся от атомарности и введем следующий сценарий для вызова мультиметодов: поиск функций; принятие решения о вызове; и, наконец, вызов. В реальной жизни это позволило бы создавать программы, работающие по следующему сценарию: пользователь выделяет произвольное число объектов; по этому списку производится поиск методов; программист помещает доступные операции на инструментальную панель; пользователь выбирает среди возможных, нажимает кнопку – и вызывается нужный мультиметод. Чем вам не «программирование будущего»?
Теперь попробуем собрать рассуждения в кучу и начнем приближаться к реалиям С++. Итак, мультиметоды – это виртуальные функции, принадлежащие сразу нескольким классам. Что же у них общего? Если просмотреть мультиметоды, приведенные выше, можно сказать, что, во-первых, все аргументы мультиметодов унаследованы от одного общего базового класса GObject. Во-вторых, все приведённые выше мультиметоды относятся к одному виду операции – join. Таким образом, мультиметоды могут быть сгруппированы в семейства по базовому классу аргументов и типу операции:
family Join<GObject>
{
// семейство мультиметодов Join для класса GObject// == method declarations =======================
};
|
Так как семейство создает область видимости, то мультиметодам можно давать более осмысленные имена:
family Join<GObject> {
Figure * line_from_pp(GPoint * a, GPoint * b);
Figure * triangle_from_ppp(GPoint * a, GPoint * b, GPoint * c);
Figure * triangle_from_fp(GFin * a, GPoint * b);
Figure * box_from_ff(GFin * a, GFin * b);
Figure * box_x_from_ff(GFin * a, GFin * b);
};
|
Чтобы осуществилась задуманная стратегия вызова мультиметодов (поиск-решение-вызов), введем следующие «операции» для семейства:
// первая часть вызова - задаем список аргументов argList
void Join<GObject>::args_set(GObject * argList[], size_t argc);
// число найденных мультиметодов для заданного argList
size_t Join<GObject>::method_count();
// некая информация об найденном мультиметоде
method_info& Join<GObject>::method_info(size_t index);
// вызов мультиметода - argList разврачивается // в список параметров конкретного метода
Figure * Join<GObject>::invoke(size_t index);
|
Пример использования:
// пользователь выделил объекты
void selection_onChange(GObject * selection[], size_t n)
{
// задаем список аргументов для мультиметода
Join<GObject>::args_set(selection, n);
// помещаем на тулбар кнопки, соотвествующие разрешенному набору действийfor (size_t i = 0; i < Join<GObject>::method_count(); i++)
toolbar_button_add(Join<GObject>::method_info(i));
}
// пользователь нажал кнопку на тулбареvoid toolbar_button_onClick(size_t methodIndex)
{
// вызываем нужный мультиметод
Figure * f = Join<GObject>::invoke(methodIndex);
}
|
Теперь, когда с теоретической точки зрения всё стало ясно, можно подумать и о реализации. Необходимо реализовать поддержку семейств мультиметодов так, чтобы их можно было удобно использовать в С++. Как семейство может быть реализовано физически? Очевидно, что семейству соответствует некая ассоциативная mvtable (multimethod-vtable), ключом для поиска функций в которой является список типов аргументов. В С++ работу по созданию обычной vtable берет на себя компилятор. Чтобы избавить программиста от необходимости создания mvtable вручную, я написал утилиту xmmdc - MultiMethod Description Compiler (см. MMDemo\XMMDC) которая генерирует готовый шаблон mvtable на основе XML-описания.
Описание mvtable в формате XML (MMDemo\MyMVT.xml):
<mvtable name ='MyMVTBase'> <method name ='ppp_link' dsc='Make Triangle'> <arg type='GPoint'/> <arg type='GPoint'/> <arg type='GPoint'/> </method> <method name ='ppp_link' dsc='Make Line'> <arg type='GPoint'/> <arg type='GPoint'/> </method> <method name ='pf_link' dsc='Make Triangle'> <arg type='GPoint'/> <arg type='GFin'/> </method> <method name ='ffx_link' dsc='Make X-Box'> <arg type='GFin'/> <arg type='GFin'/> </method> <method name ='ff_link' dsc='Make Box'> <arg type='GFin'/> <arg type='GFin'/> </method> </mvtable> |
На основе этого описания xmmdc создает заголовочный файл, содержащий реализацию таблицы мультиметодов (MMDemo\MyMVTBase.h):
#ifndef _MyMVTBase_h_
#define _MyMVTBase_h_
// базовый класс для mvtable (MMDemo\XMMDC\XMVTable.h)#include"XMVTable.h"template <class Owner, class T>
class MyMVTBase : public XMVTable<Owner,T>
{
// Прототипы мультиметодовpublic:
void ppp_link(GPoint *,GPoint *,GPoint *) {}
void pp_link(GPoint *,GPoint *) {}
void pf_link(GPoint *,GFin *) {}
void ffx_link(GFin *,GFin *) {}
void ff_link(GFin *,GFin *) {}
// код реализации protected:
// код для работы мультиметода ppp_linkstruct X_ppp_link : XMethod<Owner,T>
{
enum { argc = 3 };
int * argList_get(bool fc, int &ac)
{
ac = argc;
staticint lst[] = { GPoint::typeId,GPoint::typeId,GPoint::typeId };
if(fc)
std::sort(lst, lst + argc);
return lst;
}
void call(Owner &o, T * objs[])
{
int i = argc-1;
T * args[argc];
std::copy(objs, objs+argc, args);
o.ppp_link((GPoint *)_arg_pop(args, i, GPoint::typeId),
(GPoint *)_arg_pop(args, i, GPoint::typeId),
(GPoint *)_arg_pop(args, i, GPoint::typeId));
}
constchar * dsc_get()
{
return"Make Triangle";
}
} x_ppp_link;
// Остальная часть опущена// ....................
};
#endif// _MyMVTBase_h_ |
Сгенерированная mvtable поддерживает следующие операции (в подробностях реализации mvtable легко разобраться по исходному тексту):
// Базовый класс для mvtable. Детали реализации опущены
template <
class Owner, // Класс реализации мультиметодовclass T // базовый класс аргументов
>
class XMVTable
{
public:
// задает список аргументовvoid args_set(T * argList [], size_t n);
// возвращает число найденных мультиметодов для последнего argList
size_t method_count() const;
// получает информацию о найденном мультиметоде
Method * method_get(int idx); // описание см. ниже// вызывает мультиметод с сохраненным списком аргументов argListvoid invoke(Method * m);
};
// класс, возвращаемый функцией XMVTable:: method_get// приведены только необходимые пользователю функции template <class Owner, class T>
struct XMethod
{
// описание мультиметода или ключ// фактически, значение аттрибута dsc из XML файлаvirtualconstchar * dsc_get() = 0;
public:
// Пользовательские данные. // Программист может связать с мультиметодом дополнительные данные,// используя эту переменную.void * userData;
};
|
А нам теперь остается только унаследоваться от этого класса и реализовать нужные методы (см. MMDemo\MyMVT.h):
#ifndef _MYMVT_h_
#define _MYMVT_h_
#include"GObject.h"#include"MyMVTBase.h"// реализация семейства мультиметодов Join<GObject>class MyMVT : public MyMVTBase<MyMVT,GObject> {
public:
GFigure figure;
// overridespublic:
void ppp_link(GPoint *,GPoint *,GPoint *);
void pp_link(GPoint *,GPoint *);
void pf_link(GPoint *,GFin *);
void ffx_link(GFin *,GFin *);
void ff_link(GFin *,GFin *);
};
//реализация одного из мультиметодовvoid MyMVT::ppp_link(GPoint * a, GPoint * b, GPoint * c) {
figure.line_add(a->A, b->A);
figure.line_add(b->A, c->A);
figure.line_add(c->A, a->A);
}
#endif// _MYMVT_h_ |
Чтобы все это работало, к классам аргументов предъявляются определённые требования. Эти классы должны содержать статическую переменную typeId, уникальную в рамках иерархии классов, и виртуальную функцию typeId_get для определения типа во время исполнения.
struct GObject
{
virtualint typeId_get() = 0;
};
struct GPoint : GObject
{
enum { typeId = 1 };
int typeId_get()
{
return typeId;
}
};
struct GFin : GObject
{
enum { typeId = 2 };
int typeId_get()
{
return typeId;
}
};
|
Пример использования мультиметодов рассматривается в демо-проекте MMDemo. В нем реализована описанная выше стратегия, то есть выбор объектов, поиск мультиметодов по списку аргументов, вывод доступных операций пользователю и вызов выбранного мультиметода. Следующие функции показывают эту стратегию в действии:
class CMMDemoDlg : public CDialog
{
MyMVT _mvt; // таблица мультиметодов в классе диалога// ...
};
// пользователь выбрал объекты
LRESULT CMMDemoDlg::canvas_onSel(WPARAM,LPARAM)
{
int i, c = 0;
GObject * objs[5];
// формируем список аргументовfor (i = 0; i < _canvas.object_count(); i++)
{
GObject * o = _canvas.object_get(i);
if (o->selected_is())
objs[c++] = o;
}
// передаем список в mvtable
_mvt.args_set(objs, c);
_mmList.ResetContent();
// выдаем пользователю список доступных операцийfor (i = 0; i < _mvt.method_count(); i++)
{
MyMVT::Method * mm = _mvt.method_get(i);
int idx = _mmList.AddString(mm->dsc_get());
_mmList.SetItemDataPtr(idx, mm);
}
return 0;
}
// пользователь выбрал операциюvoid CMMDemoDlg::invoke_onClick()
{
int idx = _mmList.GetCurSel();
if(LB_ERR == idx)
return;
_mvt.figure.pts.clear();
// вызываем выбранный метод
MyMVT::Method * mm = (MyMVT::Method *)_mmList.GetItemDataPtr(idx);
_mvt.invoke(mm);
// выводим результат
_canvas.object_add(&_mvt.figure);
}
|
Еще раз напомню, что порядок следования аргументов в мультиметоде значения не имеет. Для поиска мультиметодов важно лишь число аргументов и их run-time типы. Также стоит обратить внимание на то, что в данной реализации не поддерживаются невиртуальные аргументы мультиметодов, но, поскольку реализация мультиметодов осуществляется в отдельном классе, это несущественно, так как невиртуальные аргументы можно передавать через атрибуты класса.
extern MyMultimethodVTable mvt;
void test(MyObject * argv[], size_t argc, MyNonVirtualArg & arg)
{
mvt.nonVirtualArg = arg;
mvt.args_set(argv, argc);
mvt.invoke(mvt.method_get(0));
}
|
Работа программы показана на скриншотах:

Рисунок 1. Выбраны две точки, найден мультиметод pp_link.
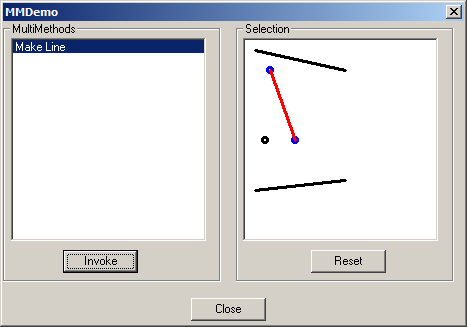
Рисунок 2. Результат выполнения мультиметода pp_link.
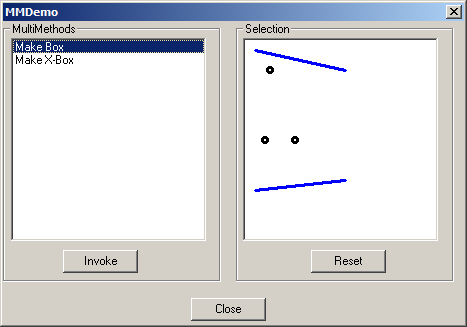
Рисунок 3. Выбраны два отрезка, найдены методы ffx_link и ff_link.
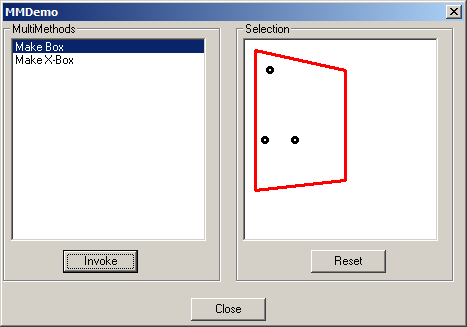
Рисунок 4. Результат ff_link.
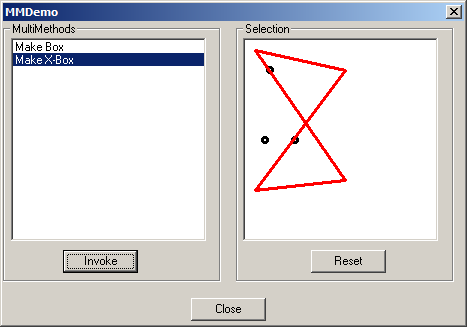
Рисунок 5. Результат работы метода ffx_link
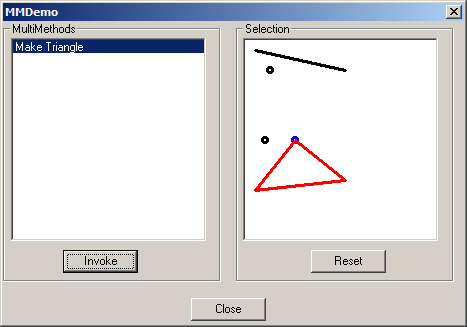
Рисунок 6. Выбраны точка и отрезок, найден метод pf_link.
И, в заключение, систематизируем процесс добавления в проект мультиметодов. Процесс должен состоять из следующих шагов:
<mvtable name='ClassAndHeaderName'>
|
xmmdc test.xml |
Как уже было сказано выше, выгодно применять их в случае, когда нужно найти операцию, применимую к списку объектов. Например, в компьютерных играх мультиметоды помогут скрестить бульдога с носорогом или же определить возможность\невозможность такой операции. Так же, например, может выбираться определенная стратегия поведения персонажа в зависимости от надетых на него доспехов:
class Hero : public GameObject
{
// ...
};
class Frodo : public Hero
{
// ...
};
class Item : public GameObject
{
// ...
};
class RingOfPower : public Item
{
// ...
};
Behaviour* behaviour_create(virtual Hero *hero, virtual Item *item);
Behaviour* behaviour_create(virtual Frodo *frodo, virtual RingOfPower *ring);
|
Весьма полезными окажутся мультиметоды для реализации drag-n-drop операций, так как Drag-n-drop операция разделяется между двумя классами (DropTarget и DropObject) и является мультиметодом в чистом виде:
void DragDrop(virtual SomeView*, virtual SomeItem*);
|
Описанный выше пример с операцией join показывает, что их можно использовать для создания интеллектуального пользовательского интерфейса, в котором доступные операции предлагаются в зависимости от выделения, контекста, окружения и т.д.
Приведенные примеры показывают, что хотя мультиметоды еще и не освоены массами, но могут существенно упростить решение задач программирования во многих областях.
| Оценка 336
[+1/-0]
Оценить
|